Radar-Görüş Füzyon Sistemleri: PTZ Kameralardan ‘Anında’ Hızlı Yanıt Elde Etme

14:41
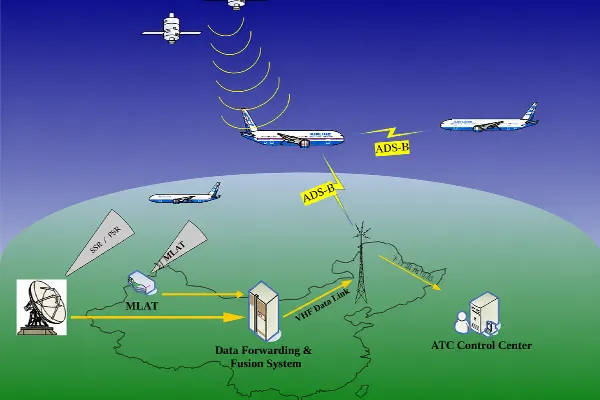
İçinde radar-görüş füzyonu sistemlerde, radar hedefleri "algılamaktan" (koordinat bilgisi sağlama) sorumluyken, PTZ (Pan-Tilt-Zoom) kameralar hedefleri "tanımlamaktan" (görsel doğrulama) sorumludur. Radarın hedef koordinatlarını algılaması ile PTZ kameranın hedefe yönelmesi arasındaki gecikme ne kadar düşükse, sistemin pratik değeri o kadar yüksek olur.

Temel donanım bağlantı seçiminin ötesinde, hızlı yanıt elde etmenin özü aşağıdaki dört anahtar teknolojide yatmaktadır:
1. İletişim Bağlantılarının “Aşırı Hız” Optimizasyonu
Temel fiziksel bağlantı, veri iletiminin üst sınırını belirler.
- Arayüz Protokol Seçimi: RS232 ile karşılaştırıldığında, RS422 veya RS485 uzun mesafe iletimi ve parazit koruması açısından üstünlük sağlar. Entegre radar-görüş biriminde, çift yönlü RS422 kullanılması, hem komut gönderimi hem de durum geri bildiriminin bant genişliği çatışması olmadan eşzamanlı yapılmasına olanak tanır.
- Baund Hızı Optimizasyonu: Yaygın 9600bps hızı karmaşık komutlarda fark edilir gecikmelere neden olabilir. Profesyonel çözümler genellikle baud hızını 115200bps veya daha yukarıya çıkararak saniyede yüzlerce koordinat güncellemesinin işlenmesini sağlar.
- Ağ Kontrollü: Üst düzey sistemlerde, Ethernet üzerinden komut iletimi için TCP yerine UDP protokolünün kullanılması, iletişim el sıkışmalarının neden olduğu gecikmeyi daha da azaltabilir.
2. Akıcı ve Etkili “Özel Protokoller”
Pelco-D gibi genel standart protokoller iyi uyumluluk sunar ancak genellikle fazla komut fazlalılığı içerir.
- Değişken Uzunlukta Komut Optimizasyonu: Her bir komutun byte sayısını sıkıştırmak için daha özlü ikili özel protokoller kullanmak.
- Mutlak Konumlandırma Kontrolü: Geleneksel kontrol 'sola dön' oran komutları gönderirken, bu 'dur-kalk' hareketlere yol açabilir. Hızlı yanıt sistemi mutlak PTZ koordinatlarının doğrudan iletimini desteklemeli. Radar enlem/boylam veya göreceli pozisyon hesapladıktan sonra, bunlar doğrudan PTZ’nin Pan ve Tilt açılarına eşlenerek tek adımda hassas konumlandırma sağlanır.
3. PTZ İçsel "Servo Kontrol" Algoritmaları
Hızlı donanım dönüşü doğruluğu garanti etmez. Sağlam algoritmalar olmadan, Pan-Tilt Birimi birimleri salınım veya aşım yaşayabilir.
- Ön Beslemeli Kontrol: PTZ kontrol birimi, radarın verdiği hedef hızı bilgisine dayanarak hedefin sonraki saniyeki pozisyonunu önceden tahmin ederek motor hareketini başlatır ve bu sayede başlatma ataleti ortadan kaldırılır.
- PID Dinamik Ayarı: Optimize edilmiş PID (Oransal-İntegral-Türev) algoritmaları kullanılarak maksimum hıza sorunsuz ivmelenme ve hedef pozisyona ulaşıldığında titreşim önleyici yavaşlama sağlanır.
- Yüksek Hassasiyetli Kodlayıcılar: Yüksek çizgi sayısına sahip kodlayıcılarla birlikte, PTZ biriminin gerçek zamanlı ve doğru pozisyon geri bildirimi sağlaması garanti edilir (geri bildirim sıklığı 50Hz veya daha yüksek önerilir).

4. Sistem Mimarisinde “Kenar Tarafı” Füzyon
Yanıt hızının en büyük düşmanı “aşırı uzun geri dönüş döngüsüdür.”
- Yerel Karar Verme: Radar verilerini komut vermeden önce bir arka uç sunucusuna gönderip işlemek yerine, radar-görüş entegre biriminin kenarında koordinat dönüşümü (GCS’den PTZ koordinat sistemine) ve komut verme işlemi yapılmalıdır.
- Frekans Senkronizasyonu: Radar yenileme hızı (genellikle 10Hz-20Hz) ile PTZ kontrol frekansı interpolasyonla dengelenmelidir. Radar sinyallerinin algoritmalarla yumuşatılması, radar verisindeki dalgalanmalar nedeniyle PTZ’de takılma oluşmasını önler.
Sonuç: Radar-Görüş Füzyon PTZ Seçim Kontrol Listesi
Bir radar-görüş füzyon sistemi geliştiriyor veya seçiyorsanız aşağıdaki parametrelere odaklanmanız tavsiye edilir:
| Boyut |
Profesyonel Gereklilik |
Temel Değer |
| Fiziksel Arayüz |
Çift yönlü RS442 veya Gigabit Ethernet |
İki yönlü, çakışmasız veri iletimi sağlar |
| İletişim Frekansı |
Komut güncelleme frekansı ≥ 25Hz |
Kesintisiz görsel takip garanti eder |
| Kontrol Yöntemi |
Mutlak Açı Konumlandırmayı Destekler (Mutlak P/T) |
Amaçsız dönüşü ortadan kaldırır, hassas hedefleme sağlar |
| Geri Bildirim Mekanizması |
Yüksek hızlı gerçek zamanlı pozisyon geri bildirimi |
Kapalı döngü kontrol için veri desteği sağlar |
Son Düşünceler:
Hızlı tepki yalnızca "hızlı motor dönüşü" değildir; iletişim bant genişliği, protokol verimliliği ve hareket kontrol algoritmalarının hassas bir sinerjisidir. Fiziksel bağlantıları optimize ederek ve uç taraf koordinat dönüşüm algoritmalarını entegre ederek, radar-görüntü füzyon sistemleri gerçekten "nokta ve çek" kabiliyetlerine ulaşabilir ve alt saniye hedef kilidi sağlayabilir.
Gözetim Kapasitelerinizi Geliştirmeye Hazır mısınız?
Bugün özel bir çözüm için MidRadar ile iletişime geçin!