Радарно-визуальные системы слияния: достижение «мгновенного» быстрого реагирования от ПНЗ камер

14:41
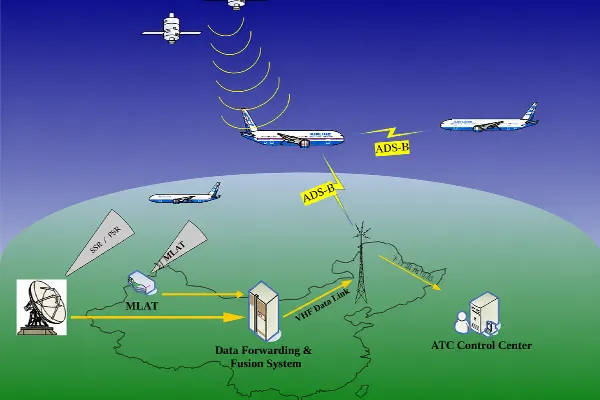
In радарно-визуальное слияние systems, radar is responsible for “detecting” targets (providing coordinate information), while PTZ (Pan-Tilt-Zoom) cameras are responsible for “identifying” targets (visual confirmation). The lower the latency between radar detecting target coordinates and the PTZ camera aligning to the target, the higher the system’s practical value.

Помимо выбора базового аппаратного соединения, ядром достижения быстрого реагирования являются следующие четыре ключевые технологии:
1. Оптимизация коммуникационных каналов «экстремальной скорости»
Основное физическое подключение определяет верхний предел передачи данных.
- Выбор протокола интерфейса: По сравнению с RS232, RS422 или RS485 предлагают превосходную дальнодействие и помехозащищённость. В интегрированном радарно-визуальном блоке рекомендуется использование полно-дуплексного RS422 для одновременного выдачи команд и обратной связи без конфликта по пропускной способности.
- Оптимизация скорости передачи (скорости передачи бит): Стандартные 9600 бод могут вызывать заметные задержки при сложных командах. Профессиональные решения обычно увеличивают скорость передачи до 115200 бод и выше, обеспечивая возможность обработки сотен обновлений координат в секунду.
- Сетевое управление: Для высококлассных систем применение протокола UDP (вместо TCP) для передачи управляющих команд по Ethernet позволяет дополнительно снизить задержки, вызванные обменом подтверждениями.
2. Упрощённые и эффективные «приватные протоколы»
Стандартные универсальные протоколы, такие как Pelco-D, обеспечивают хорошую совместимость, но часто имеют значительное дублирование команд.
- Оптимизация переменной длины команд: Использование более компактных бинарных приватных протоколов для сжатия количества байт в отдельных командах.
- Управление абсолютным позиционированием: Традиционное управление предполагает отправку команд типа «повернуть влево» с определённой скоростью, что может приводить к эффекту «стоп-энд-гоу». Система быстрого реагирования должна поддерживать прямую передачу абсолютных координат ПНЗ. После вычисления радаром широты/долготы или относительной позиции, они напрямую отображаются на углы Пан и Наклона ПНЗ, обеспечивая точное позиционирование в один шаг.
3. Встроенные алгоритмы «сервоконтроля» ПНЗ
Fast hardware rotation does not guarantee accuracy. Without robust algorithms, Pan-Tilt Unit units can experience oscillation or overshoot.
- Управление с упреждением: Блок управления ПНЗ предсказывает позицию цели на следующий момент времени на основе скорости цели, предоставленной радаром, и предварительно запускает движение моторов, устраняя инерцию запуска.
- Динамическая настройка PID: Использование оптимизированных PID (пропорционально-интегрально-дифференциальных) алгоритмов обеспечивает плавное ускорение до максимальной скорости и замедление до остановки, предотвращая дрожание при достижении цели.
- Высокоточные энкодеры: В сочетании с энкодерами с высоким числом линий обеспечивают ПНЗ реальную и точную обратную связь о позиции (рекомендуемая частота обратной связи 50 Гц и выше).

4. Слияние на «пограничном» уровне архитектуры системы
Главный враг скорости реакции — «чрезмерно длинный цикл».
- Локальное принятие решений: Избегайте передачи радарных данных на сервер для обработки перед выдачей команд ПНЗ. Вместо этого выполняйте преобразование координат (GCS в систему координат ПНЗ) и выдачу команд непосредственно на границе интегрированного радарно-визуального блока.
- Синхронизация частоты: Частота обновления радара (обычно 10 Гц-20 Гц) и частота управления ПНЗ требуют интерполяционной компенсации. Сглаживание радарных сигналов с помощью алгоритмов предотвращает заикание ПНЗ из-за колебаний радарных данных.
Заключение: Контрольный список выбора ПНЗ для радарно-визуального слияния
Если вы разрабатываете или выбираете систему радарно-визуального слияния, рекомендуется обратить внимание на следующие параметры:
| Размеры |
Профессиональное требование |
Ключевая ценность |
| Физический интерфейс |
Полный дуплекс RS422 или гигабитный Ethernet |
Обеспечивает двунаправленную передачу данных без столкновений |
| Частота связи |
Частота обновления команд ≥ 25 Гц |
Гарантирует плавное визуальное сопровождение |
| Метод управления |
Поддержка абсолютного углового позиционирования (Абсолютный П/Н) |
Исключает бесцельное вращение, достигает точного наведения |
| Механизм обратной связи |
Высокоскоростная реальная обратная связь по положению |
Обеспечивает данные для замкнутого управления |
Итоговые мысли:
Rapid response is not merely about “fast motor rotation”; it is a precise synergy of communication bandwidth, protocol efficiency, and motion control algorithms. By optimizing physical links and integrating edge-side coordinate conversion algorithms, radar-vision fusion systems can truly achieve “point-and-shoot” capabilities, enabling sub-second target locking.
Ready to Enhance Your Surveillance Capabilities?
Contact MidRadar for a customized solution today!