أنظمة دمج الرادار والرؤية: تحقيق استجابة سريعة 'فورية' من كاميرات PTZ

14:41
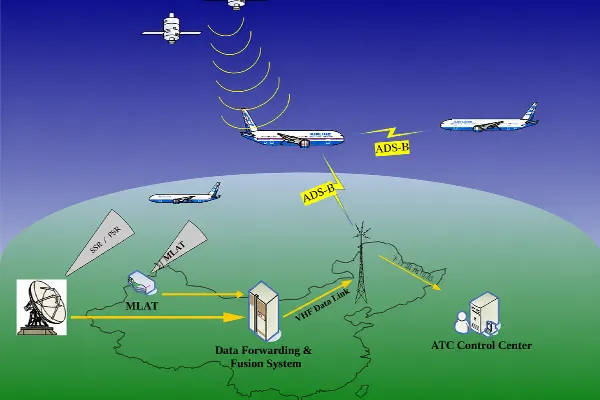
في دمج الرادار والرؤية الأنظمة، يكون الرادار مسؤولاً عن "كشف" الأهداف (توفير معلومات الإحداثيات)، بينما كاميرات PTZ (تحريك-إمالة-تكبير) تكون مسؤولة عن "تحديد" الأهداف (التأكيد البصري). كلما كان زمن التأخير بين كشف الرادار لإحداثيات الهدف وتوجيه كاميرا PTZ نحو الهدف أقل، زادت القيمة العملية للنظام.

بعيداً عن اختيار ربط الأجهزة الأساسي، يكمن جوهر تحقيق الاستجابة السريعة في التقنيات الرئيسية الأربعة التالية:
1. تحسين "السرعة القصوى" لروابط الاتصال
يحدد الاتصال الفيزيائي الأساسي الحد الأعلى لنقل البيانات.
- اختيار بروتوكول الواجهة: مقارنة بـ RS232، يوفر RS422 أو RS485 قدرات أفضل للنقل لمسافات طويلة ومقاومة للتداخل. داخل وحدة مدمجة للرادار والرؤية، يُنصح باستخدام RS422 كامل-duplex لتمكين إصدار الأوامر وردود الفعل في نفس الوقت بدون تعارض في عرض النطاق الترددي.
- تحسين معدل البود: معدل 9600bps الشائع يمكن أن يسبب تأخيرات ملحوظة مع الأوامر المعقدة. عادةً ما تزيد الحلول الاحترافية معدل البود إلى 115200bps أو أكثر، مما يضمن معالجة مئات تحديثات الإحداثيات في الثانية.
- التحكم الشبكي: لأنظمة متقدمة، استخدام بروتوكول UDP (بدلاً من TCP) لنقل أوامر التحكم عبر الإيثرنت يمكن أن يقلل أكثر من التأخير الناجم عن مصافحات الاتصال.
2. "البروتوكولات الخاصة" المُبسطة والفعالة
البروتوكولات القياسية العامة مثل Pelco-D توفر توافقاً جيداً لكنها غالباً ما تحتوي على تكرار كبير في الأوامر.
- تحسين أوامر الطول المتغير: استخدام بروتوكولات خاصة ثنائية أكثر إيجازاً لضغط حجم الأوامر الفردية.
- التحكم بالتحديد المطلق: التحكم التقليدي ينطوي على إرسال أوامر معدل "دوران لليسار"، مما يؤدي إلى حركة "توقف وانطلاق". يجب أن يدعم نظام الاستجابة السريعة إرسال إحداثيات PTZ المطلقة مباشرة. بعد حساب الرادار لخط العرض/الطول أو الموقع النسبي، يربطها مباشرة بزوايا Pan و Tilt للـ PTZ، محققاً تحديد موقع دقيق خطوة واحدة.
3. خوارزميات "التحكم الخدمي" الداخلية في PTZ
التدوير السريع للأجهزة لا يضمن الدقة. بدون خوارزميات قوية، وحدات تحريك-إمالة قد تواجه اهتزازًا أو تجاوزًا.
- التحكم التنبؤي: تتوقع وحدة التحكم في PTZ موقع الهدف في الثانية التالية استناداً إلى سرعة الهدف المقدمة من الرادار، فتبدأ حركة المحرك مسبقاً للقضاء على قصور البداية.
- الضبط الديناميكي PID: استخدام خوارزميات PID (تناسبية، تكاملية، تفاضلية) محسنّة يضمن تسارعاً سلساً إلى أقصى سرعة وتباطؤاً سلساً حتى التوقف، مما يمنع الاهتزاز عند الوصول للموقع الهدف.
- عدادات ذات دقة عالية: مقترنة مع عدادات خطوط عالية، تضمن هذه توفير وحدة PTZ لملاحظات موقع دقيقة وفي الوقت الحقيقي (التردد الموصى به للملاحظات 50 هرتز أو أعلى).

4. دمج "جانب الحافة" في هيكل النظام
أكبر عدو لسرعة الاستجابة هو "حلقات طويلة للغاية."
- اتخاذ القرار المحلي: تجنب إرسال بيانات الرادار إلى خادم خلفي للمعالجة قبل إصدار الأوامر للـ PTZ. بدلاً من ذلك، يتم إجراء تحويل الإحداثيات (من نظام إحداثيات الأرض GCS إلى نظام إحداثيات PTZ) وإصدار الأوامر مباشرة عند حافة وحدة دمج الرادار والرؤية.
- مزامنة التردد: معدل تحديث الرادار (عادة 10-20 هرتز) وتردد تحكم الـ PTZ يحتاجان لتعويض بالاستيفاء. تنعيم إشارات الرادار باستخدام الخوارزميات يمنع توقف الـ PTZ بسبب تقلبات بيانات الرادار.
خلاصة: قائمة اختيار PTZ لدمج الرادار والرؤية
إذا كنت تطور أو تختار نظام دمج رادار ورؤية، يُنصح بالتركيز على المعايير التالية:
| الأبعاد |
المتطلبات المهنية |
القيمة الأساسية |
| الواجهة الفيزيائية |
RS422 كامل-duplex أو إيثرنت جيجابت |
يضمن نقل بيانات ثنائي الاتجاه خالٍ من التصادمات |
| تردد الاتصال |
تردد تحديث الأوامر ≥ 25 هرتز |
يضمن تتبع بصري سلس |
| طريقة التحكم |
يدعم تحديد الموقع بالزاوية المطلقة (PS/T المطلقة) |
يقضي على الدوران العبثي، ويحقق استهدافاً دقيقاً |
| آلية الملاحظات |
ملاحظات موقع ذات سرعة عالية وفي الوقت الحقيقي |
توفر دعم بيانات للتحكم ذو الحلقة المغلقة |
أفكار ختامية:
الاستجابة السريعة ليست مجرد "تدوير محرك سريع"؛ بل هي تضافر دقيق بين عرض النطاق الترددي للاتصالات، وكفاءة البروتوكولات، وخوارزميات التحكم في الحركة. من خلال تحسين الروابط الفيزيائية ودمج خوارزميات تحويل الإحداثيات على حافة النظام، يمكن لأنظمة دمج الرادار والرؤية تحقيق قدرات "التوجيه والإطلاق" الحقيقية، مما يتيح قفل الهدف في أجزاء من الثانية.
هل أنت مستعد لتعزيز قدرات المراقبة الخاصة بك؟
تواصل مع MidRadar للحصول على حل مخصص اليوم!