| Paramètre |
Spécification |
Paramètre |
Spécification |
| Model & Working Range |
| Nom du modèle |
MR-AUS20-RD03 Radar-EO Low-Altitude Detection System |
Typical Target |
0.3 m × 0.3 m UAV target, typical target: DJI Phantom 4 |
| Radar Detection Range |
≥3000 m |
Visible-Light Tracking Range |
≥3000 m |
| Thermal Imaging Tracking Range |
≥1000 m |
|
|
| Radar Detection |
| Fréquence de fonctionnement |
X / Ku band optional |
Technologie |
Mechanical azimuth scanning, elevation DBF |
| Couverture en Azimut |
360° |
Couverture en Élévation |
0° ~ 40° |
| Measurement Accuracy |
Azimuth ≤0.4° RMS, Elevation ≤0.4° RMS, Range ≤10 m RMS |
Zone morte |
≤100 m |
| Target Refresh Rate |
2 s |
Vitesse de Rotation de l'Antennes |
30 RPM (180°/s) |
| Simultaneous Tracking Capacity |
≥200 tracks |
Radial Velocity Detection Range |
1 ~ 100 m/s |
| Consommation d'énergie |
≤180 W |
Alimentation |
DC48V |
| Poids |
≤30 kg |
|
|
| Caméra HD à lumière visible |
| Capteur |
1/1.8″ starlight CMOS, ICR day/night switching |
Résolution |
2688 × 1520 |
| Objectif |
25 ~ 500 mm HD motorized zoom lens |
Encodage vidéo |
H.264 / H.265 |
| Amélioration d'image |
Wide dynamic range, highlight suppression, 3D digital noise reduction, automatic white balance, etc. |
Désembuage |
Optical / electronic dual defog supported |
| Infrared Thermal Imaging |
| Détecteur |
Uncooled VOx infrared focal plane array |
Résolution |
640 × 512 |
| Objectif |
25 ~ 100 mm, 4× optical zoom lens |
NETD |
≤40 mK |
| Encodage vidéo |
H.264 / H.265 |
Contrôle de lentille |
Manual / automatic focus |
| Servo Pan-Tilt |
| Structure |
T-type, coaxial side-mounted |
Rotation Range |
Horizontal N × 360°, pitch -30° ~ +60°, supports software and hardware limits |
| Vitesse de rotation |
Horizontal 0.01° ~ 100°/s, Pitch 0.01° ~ 70°/s |
Positioning Speed |
Horizontal ≥120°/s, Pitch ≥100°/s |
| Acceleration |
Horizontal 100°/s², Pitch 100°/s² |
Précision de positionnement |
Better than 0.005° |
| Zero Position Setting |
Supports horizontal and pitch zero position setting |
Positions prédéfinies |
≥2048 |
| Capacité de charge |
≥50 kg |
|
|
| AI Tracking |
| Implementation |
Front-end embedded hardware recognition and tracking |
Tracking Mode |
Manual tracking, automatic tracking, radar linkage supported |
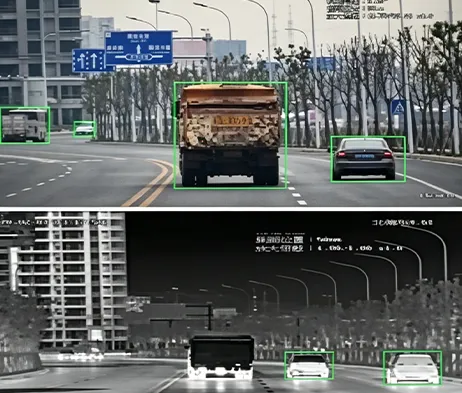
| Reconnaissance |
Supports classification of people, vehicles, vessels, UAVs and other targets |
Dataset Requirement |
Customer assistance required for dataset provision |
| Overall System |
| Interface |
Ethernet port |
Alimentation |
AC220V ±20%, 50Hz |
| Consommation d'énergie |
Peak ≤800 W, average ≤300 W |
Poids |
≤100 kg, excluding power box |
| Dimensions |
≤L650 mm × W400 mm × H1450 mm |
Évaluation de la protection |
IP66 |
| Température de fonctionnement |
-40℃ ~ +60℃ |
|
|
| RGS2000 Low-Altitude Target Prevention, Control and Identification System |
| Integrated Control & Display |
Platform-based centralized control and display of radar and electro-optical systems |
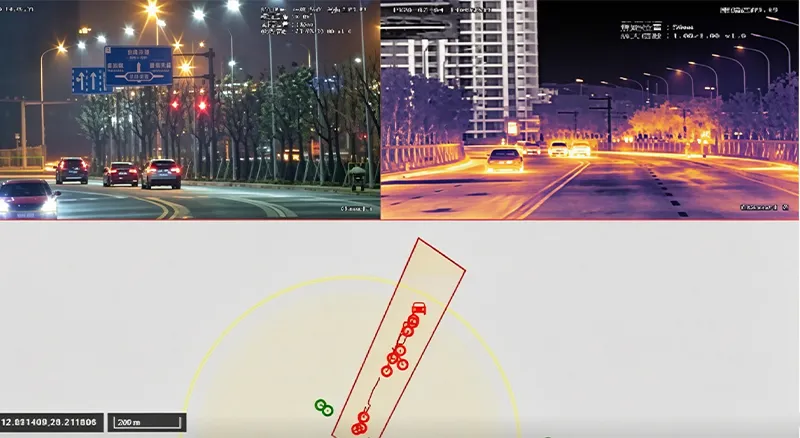
Situation Display |
Dynamic display of UAV target points and track information; supports radar target tracks and synchronized video recording playback |
| Auxiliary Tools |
Supports distance, area and angle measurement; static calibration azimuth calculation; radar-EO assisted calibration |
Electronic Map |
Supports electronic maps and radar-EO coordinate locations; online and offline 2D maps |
| Multi-Screen Display |
Supports split-screen display of video preview, electronic map, video monitoring, video playback and information management |
Unattended Operation |
Supports radar track data fusion, automatic radar-EO linkage and unattended multi-target operation |